



O sensor de posição sem contato mecânico, é utilizado na medição de deslocamento linear. São instalados, por exemplo, em equipamentos de testes e instrumentos de medição. Acompanhe nesta matéria, mais informações
|
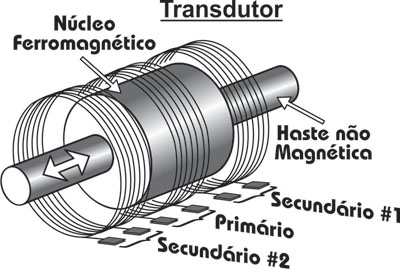
É um transdutor eletromecânico que produz uma tensão de saída proporcional ao deslocamento de um núcleo ferromagnético móvel de alta permeabilidade. O seu funcionamento está baseado num transformador de 3 bobinas |
Por ser do tipo “sem contato mecânico” a sua confiabilidade resulta superior àquela dos resistivos (de contato mecânico).
Funcionamento
O enrolamento primário é excitado com tensão alterna (senoidal) de amplitude e frequência constantes. O campo magnético gerado induz tensões de igual frequência nos enrolamentos secundários. De forma similar a um transformador convencional, o núcleo ferromagnético de alta permeabilidade favorece a transferência de energia aos secundários. Estes estão enrolados em sentido contrário pelo que as tensões geradas são de polaridade (fase) oposta: quando num deles é positiva no outro é negativa e aumentam ou diminuem o seu valor dependendo da posição relativa do núcleo. Ver ondas de Vs1 e Vs2 na figura 3a.
Na condição em que o núcleo ferromagnético se encontra eqüidistante dos secundários (figura 2a), as tensões induzidas são de igual amplitude e de fase oposta (180 graus).
A diferença de tensão (diferencial de tensão) entre os secundários é, portanto, nula. Vs1-Vs2=0. (figura 3a)
A movimentação do núcleo para um ou outro lado da posição equidistante, provoca uma maior indução de tensão no secundário mais próximo e menor naquele afastado. Nesse caso, a diferença de tensão aumenta ([Vs1–Vs2] diferente de 0).
- Na situação da figura 2b o núcleo, na sua posição extrema, reforça a indução no secundário #1. Com isto, aumenta Vs1 (atinge o valor máximo) e diminui Vs2 (atinge o valor mínimo). (figura 3b)
- Na situação da figura 2c o núcleo, na sua posição extrema, reforça a indução no secundário #2.
Leia também
Com isto, aumenta Vs2 (atinge o valor máximo) e diminui Vs1 (atinge o valor mínimo). (figura 3c)
- Nas posições intermediárias do núcleo, a diferença Vs1-Vs2 assume valores entre o máximo e o mínimo.
Além das bobinas e o núcleo, o sensor consta de um circuito eletrônico que processa e condiciona os sinais Vs dos secundários e gera a excitação Vp do primário.
A figura 4 mostra o esquemático do sensor. O conversor analógico/digital tem a função de digitalizar o sinal diferencial das tensões dos secundários (Es de saída), para ser processado pelo microprocessador.
Por sua vez, o conversor digital/analógico transforma o sinal digital, gerado pelo microprocessador, num sinal analógico de tensão alternada (Ee de entrada) para excitação do primário do transdutor.
A figura 5a mostra como varia o valor absoluto (sem apresentar a polaridade do sinal) da tensão diferencial de saída Es em função do deslocamento do núcleo. Salienta o fato que, com o núcleo equidistante dos secundários, a tensão é nula e como, ao se afastar da posição equidistante, o valor absoluto aumenta linearmente. O microprocessador tem, por último, a função de processar os sinais e fornecer a tensão analógica de saída Vd (figura 5c).
A figura 6 apresenta uma aplicação prática do transdutor como sensor de posição de um elemento mecânico acionado pelo conjunto haste/engrenagem/parafuso sem fim.
Um pino solidário à engrenagem movimenta o núcleo do sensor.
Conteúdo
útil?
Faça login para avaliar
Foi útil?


 (uma bobina primária e duas secundárias) e um núcleo cilíndrico deslizante de material ferromagnético de alta permeabilidade (figura 1). Desta forma, o núcleo, solidário com o elemento cujo deslocamento se deseja medir, reforça o fluxo (campo) magnético gerado pelo primário.
(uma bobina primária e duas secundárias) e um núcleo cilíndrico deslizante de material ferromagnético de alta permeabilidade (figura 1). Desta forma, o núcleo, solidário com o elemento cujo deslocamento se deseja medir, reforça o fluxo (campo) magnético gerado pelo primário.

