
Entenda a Evolução e Funcionamento da Rede CAN em Veículos Modernos
Introdução à Eletrônica Embarcada e Multiplexagem
Com o aumento da segurança, conforto e sofisticação, os veículos atuais contam com acessórios ultramodernos como faróis e limpadores de para-brisa que ligam sozinhos e outros tantos opcionais eletrônicos, sendo necessária a utilização de vários fios e conexões elétricas que interligam diversos componentes.
Desenvolvimento da Multiplexagem
Para solucionar esse problema, as montadoras passaram a desenvolver a eletrônica embarcada de seus veículos com base em um sistema denominado multiplexagem, capaz de fazer a ligação e interação entre diversos componentes eletrônicos do veículo, reduzindo assim o número de cabos e conexões elétricas.
Devemos ressaltar também que em determinado momento tivemos veículos que foram desenvolvidos sem rede de comunicação, ou seja, os sensores passavam informação direto para os módulos e podia haver mais de um mesmo sensor para cada módulo do veículo, como por exemplo o BMW Serie 3 E36 de 1995.
Se estivéssemos em 1960, um veículo lançado naquele ano não era equipado com muitos acessórios e encontraríamos em torno de 200 metros de cabos elétricos e centenas de conexões. Nos anos 2000, um veículo mais luxuoso necessitava de cerca de 2 mil metros de fios para manter seus sistemas eletrônicos funcionando. O número de cabos aumentou para acompanhar a quantidade de acessórios que teve um aumento significativo, o que transforma o automóvel em um novelo de fios ambulante.
A rede CAN que significa Controller Area Network foi criada pela fabricante de sistemas automotivos Bosch em 1980 com intuito de diminuir a quantidade de fios presente nos veículos, criando uma rede interna que possa ser possível ao compartilhamento de informação entre os módulos, se estima que foram reduzidos a média de 2.500 para 1.000 metros de fio em comparação com a rede sem multiplexagem. Sendo que as primeiras aplicações do sistema nos automóveis Mercedes-Benz em 1992.
Dos veículos fabricados no Brasil um dos primeiros com sistema de rede de comunicação foi o Fiat Palio e também o Peugeot 206 em 2000. Depois veio vários modelos como Volkswagen Polo, Golf, a e montadora Chevrolet com o Corsa, Meriva, Zafira, Omega entre outros.
Multiplexagem significa transmitir simultaneamente duas ou mais informações através de uma única via. A multiplexagem estabelece possibilidades de evoluções da eletrônica embarcada já que seu princípio elimina consideravelmente a quantidade de fios Sensores, conectores, unidade de comando. Todas as informações que circulam na rede multiplexada estão na forma digital, ou seja, código binário.
Rede CAN de Alta Velocidade
A rede Can de alta velocidade é usada para comunicações entre subsistemas críticos que requerem altas taxas de atualização e alta precisão de dados (por exemplo, sistema de frenagem anti bloqueio, controle eletrônico de estabilidade, airbags, unidades de controle do motor, etc.). As velocidades de transferência de dados do CAN de alta velocidade variam de 1 kbit a 1 Mbit por segundo.
O CAN de alta velocidade é mais rápido do que o de baixa velocidade, mas o requisito de largura de banda para novas aplicações automotivas está aumentando a cada ano, portanto, os OEMs de automóveis agora estão instalando o CAN FD em carros novos.
Os carros modernos atuais são computadores sobre rodas, um exemplo entre interações que ocorrem entre modulo de injeção e modulo de transmissão automática e modulo freios ABS com controle de tração e estabilidade, a constante troca de informação entre os módulos apresenta um aperfeiçoamento e melhor tomada de decisão conforme o momento em que o veículo se encontra, quando esteja fazendo ultrapassagem ou numa subida ingreme ou quando estiver freando em piso escorregadio melhorando tanto e performance quanto e segurança do veículo.
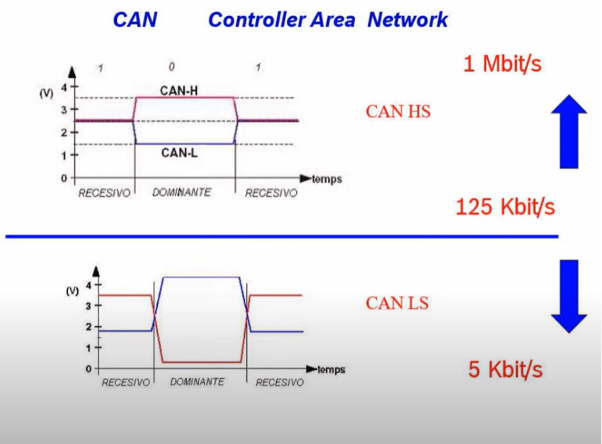
Rede CAN de Baixa Velocidade e Componentes
A rede CAN de baixa velocidade usado para sistemas tolerantes a falhas que não requerem altas taxas de atualização. A taxa máxima de transferência de dados é 125 Kbps, mas a fiação é, portanto, mais econômica do que o CAN de alta velocidade. Em aplicações automotivas, o CAN de baixa velocidade é usado para diagnósticos, controles e visores do painel, vidros elétricos, etc.
Componentes da Rede CAN
A rede CAN é composta pelos seguintes componentes:
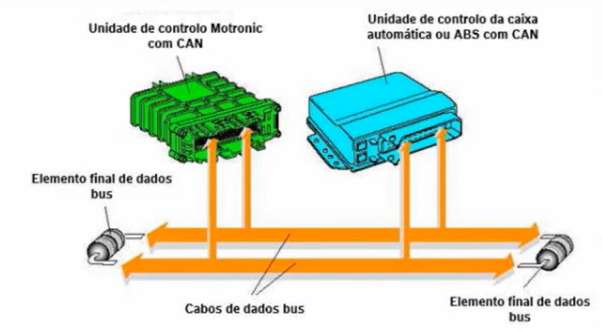
Controlador: É o microprocessador do sistema, decide os dados a enviar e a receber, bem como a prioridade dos mesmos.
Transreceptor (transmissor e receptor): Esta encarregado de converter os dados enviados pelo controlador em sinais elétricos a ser transmitidas pelos cabos da BUS, assim como o efeito inverso.
Cabos das bus: São os canais de transmissão de informação do sistema. O cabo tem como particularidade estarem entrelaçados entre si, para minimizar as possibilidades de induções parasitas e assegurar a operação do sistema no caso de pane em um dos cabos do bus de dados.
Elementos Finais (resistências): São responsáveis por fechar o circuito entre os dois cabos da CAN, garantem a reflexão dos sinais no BUS de dados e o correto funcionamento da rede CAN, os resistores normalmente tem valores de 120 Ohms.
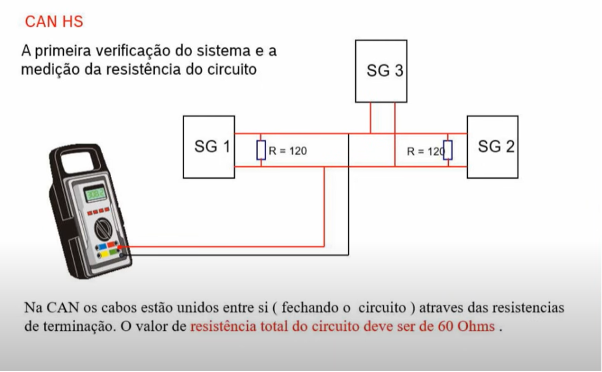
Diagnóstico da Rede CAN
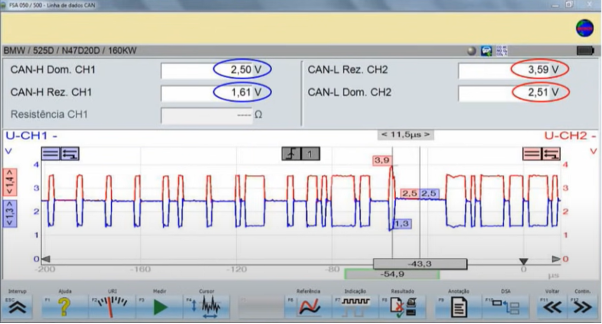
A melhor forma de se diagnosticar a rede CAN é utilizando o osciloscópio, que é um multímetro gráfico que faz a leitura da tensão sobre o tempo.
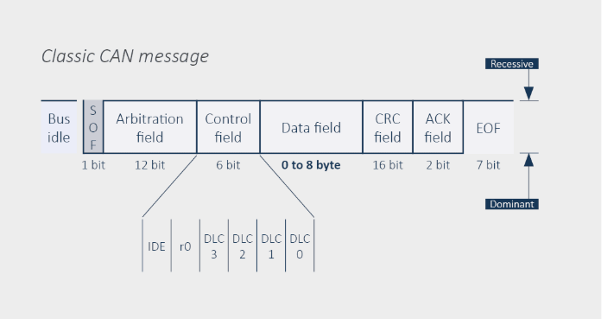
Protocolo de Transmissão de Dados na Rede CAN
Ao contrário da transmissão de dados tradicional, na qual necessitamos de um canal de transmissão por cada informação a transmitir, na CAN, utilizamos somente um canal de transmissão, para transmitir todas as informações. Para conseguir mandar múltiplas informações através de um único canal de transmissão, incluímos dentro da BUS um protocolo de dados, um protocolo que se forma enlaçando diferentes bits.
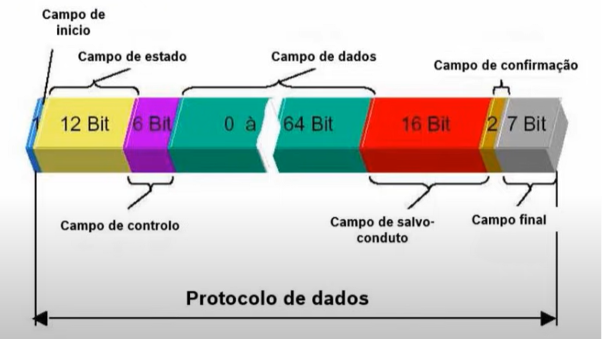
O protocolo de transmissão de dados compõe-se de vários campos:
Campo de início: Marca o início de uma mensagem e sincroniza os receptores dos módulos.
Campo de estado: identifica a prioridade para onde a mensagem deve ser enviada.
Campo de controle: identifica de onde a mensagem foi gerada.
Campo de dados: é propriamente a informação que está sendo enviada.
Campo de Salvo conduto: confirma os dados que foram enviados.
Campo de confirmação: é uma resposta dos receptores que receberem a mensagem e responderam para o local de origem da mensagem.
Campo final: marca o final da mensagem.
Evolução da Rede CAN: CAN FD
A evolução da rede CAN é a rede CAN FD (Controller Area Network Flexible Data-Rate) que foi desenvolvida o CAN FD é um passo importante porque permite que as ECUs alterem dinamicamente suas taxas de transmissão e selecionem tamanhos de mensagens maiores ou menores, com base em requisitos em tempo real. Ele é encontrado agora em veículos de alto desempenho, um dos veículos que foram lançados nacionalmente com rede CAN FD foi o Chevrolet Onix Plus 2020 com motor 1.0 12 válvulas 3 cilindros.

CAN FD também é compatível com versões anteriores e suporta o protocolo de comunicação CAN 2.0, bem como protocolos especiais como SAE J1939, onde a saída CAN é usada como somente leitura. O CAN FD é essencialmente uma extensão do padrão CAN original conforme especificado na ISO 11898-1 e é totalmente compatível com os sistemas CAN clássicos.
A necessidade de poder transferir grandes quantidades de dados cresceu, especialmente no setor automotivo. Por esse motivo, a Bosch apresentou uma versão estendida do clássico CAN familiar em 2012, na qual a taxa de dados utilizável e o comprimento dos dados do usuário foram significativamente estendidos. Por outro lado, os conceitos comprovados do CAN foram mantidos: Arbitragem com base em ID de mensagem, envio de mensagens controlado por evento e o reconhecimento de mensagens recebidas usando o bit de reconhecimento.
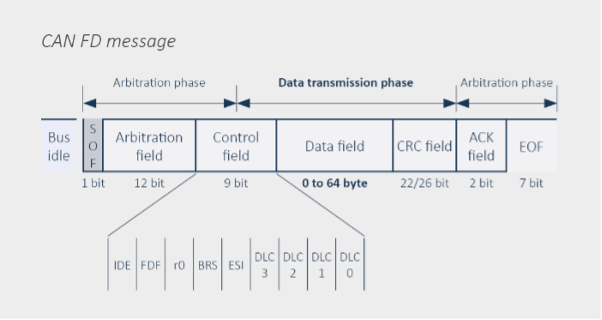
A versão mais recente do CAN apresenta uma taxa de dados flexível, mais dados por mensagem e transmissões de velocidade muito mais alta. O comprimento dos dados dentro de cada mensagem CAN padrão (baixa velocidade e alta velocidade) é de 8 bytes, mas com CAN FD isso foi aumentado em 800% para 64 bytes de dados. Além disso, a taxa máxima de dados também aumentou drasticamente de 1 Mbps para 8 Mbps.
CAN XL: A Nova Geração da Controller Area Network
CAN XL é uma nova versão da Controller Area Network (CAN), que foi lançada logo após a introdução do CAN FD. Este desenvolvimento também reflete os rápidos avanços na eletrônica automotiva. Particularmente importante aqui é a influência das tecnologias Ethernet e IP automotivas, que estão mudando significativamente a maneira como os veículos se comunicam.
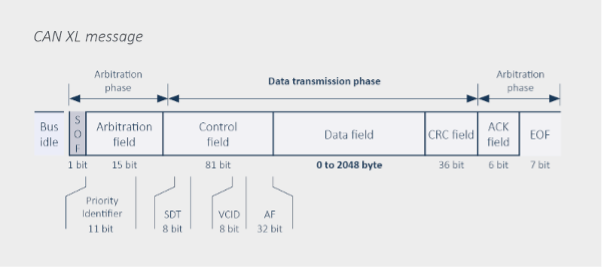
Enquanto a taxa de arbitragem permanece inalterada em <1 Mbit/s, a taxa de dados dá um grande salto para frente com até 20 Mbit/s. Com o tamanho de campo de dados estendido de até 2.048 bytes, os quadros Ethernet agora também podem ser transmitidos dentro de uma mensagem CAN pela primeira vez.
Ao introduzir um novo campo SDT (Service Data Unit Type), agora também é possível consultar o próximo protocolo de nível superior. Isso permite que os dados do usuário sejam interpretados de forma diferente dependendo do campo SDT. Além disso, o novo campo VCID (Virtual CAN Network ID) pode ser usado para subdividir uma rede CAN XL física em várias redes lógicas. Graças ao campo de 8 bits, até 256 redes lógicas diferentes podem ser operadas no CAN XL.
Em resumo, enquanto o CAN clássico foi projetado para requisitos básicos de rede, o CAN FD e o CAN XL oferecem recursos estendidos em termos de taxa de dados e comprimento de dados para lidar com a crescente necessidade de maior transmissão de dados e pacotes de dados maiores em aplicações automotivas e industriais modernas.
Conteúdo
útil?
Faça login para avaliar
Foi útil?


