

Recapitulando, a direção dinâmica ou ativa resulta da aplicação de um conceito de direção através do qual o ângulo de giro aplicado ao volante pode ser aumentado ou diminuído resultando num ângulo de esterçamento das rodas maior ou menor que o normal. Esta variação do ângulo ocorre em função da velocidade do veículo e da velocidade de movimentação do volante.
Isto se consegue integrando um atuador eletromecânico no sistema em algum ponto da coluna de direção, entre o volante e a caixa de direção. Este atuador, controlado por um módulo de comando dedicado, possui um conjunto de engrenagens, acionado por um motor elétrico, através do qual pode ser adicionado ou subtraído um ângulo àquele aplicado ao volante, permitindo realizar a superposição de ângulos.
Por outro lado, a direção dinâmica permite gerar um ângulo de esterçamento independente do condutor e nesta situação, a direção ativa funciona como um complemento do sistema de estabilidade dinâmica.
Em resumo, a direção dinâmica permite implementar o conceito de relação de esterçamento variável.
Tipos de atuadores utilizados atualmente
1. Engrenagem harmônica. (nesta edição).
2. Conjunto planetário/roda de coroa. (edição anterior).
Em ambos os casos, os atuadores cumprem a função de variar a relação de transmissão entre o ângulo de rotação do volante e o ângulo de rotação do eixo intermediário. Nas baixas velocidades a relação de transmissão é de incremento. Nas altas velocidades é de redução.
Nos atuadores mencionados, o ângulo adicionado ou subtraído se consegue através de um motor elétrico controlado por um módulo de comando dedicado.
O sistema constituído pela unidade de direção dinâmica (atuador) e o módulo de comando transmite às rodas o ângulo aplicado ao volante pelo condutor e o ângulo de superposição (de adição ou subtração) gerado pelo motor elétrico de controle.
Engrenagem Harmônica
As características mais relevantes deste dispositivo são:
- Elevada relação de transmissão;
- Alta relação torque/peso;
- Eliminação da folga entre engrenagens.
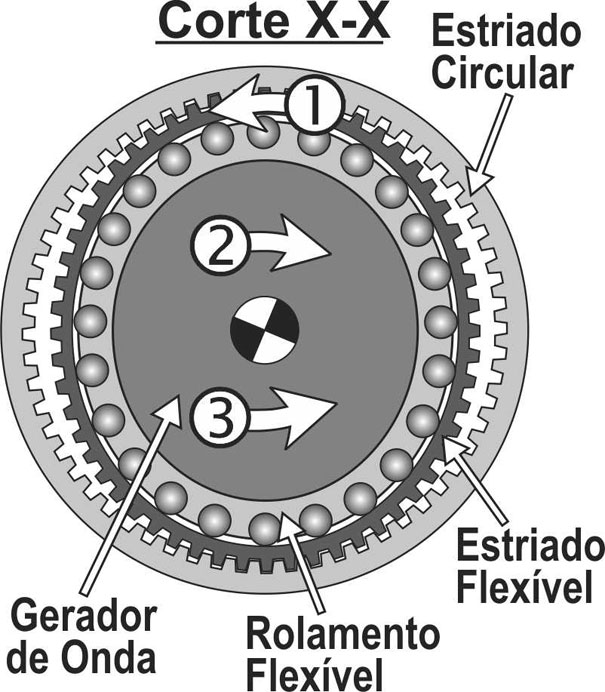
São seus componentes (figura 1):
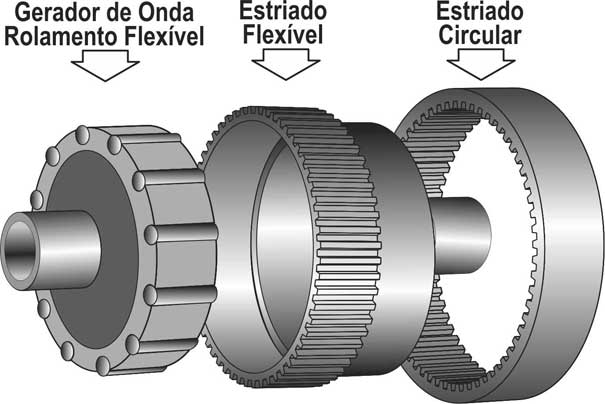
1. Gerador de onda. É um conjunto formado por um disco de aço de forma elíptica, circundado por um rolamento flexível o qual adota também a forma elíptica.
2. Estriado flexível. Construído em aço de parede fina com dentes maquinados na superfície externa. O grande diâmetro deste componente (em relação à espessura da parede) lhe oferece a necessária flexibilidade mantendo a rigidez torcional.
O gerador de onda é instalado dentro do estriado flexível, que assume assim a forma oval.
Em funcionamento este componente estriado vai se deformando assim que o conjunto disco/rolamento flexível gira dentro dele. No entanto o stress resultante da onda de deformação, à qual é submetido, é bem inferior ao limite máximo suportado pelo material.
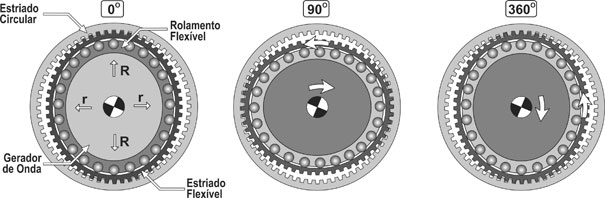
3. Estriado circular. É um anel de aço rígido com dentes internos dentro do qual é encaixado o conjunto gerador de onda/estriado flexível. Os dentes do estriado flexível engrenam com os correspondentes do estriado circular nos pontos extremos do eixo maior (R-R) da elipse (Fig. 2a). Em função dos dentes terem certa altura, o contato se dá não só em dois pontos mas, entre os dentes em torno dos extremos do eixo maior da elipse.
Na realidade, até 30% dos dentes em torno do eixo maior estão engrenados constantemente. Ao mesmo tempo em torno do eixo menor (r-r) não há contato entre o estriado circular e o flexível. Na aplicação prática deste princípio, o estriado flexível possui 2 dentes a menos que o estriado circular.
A figura 2a apresenta um corte da engrenagem harmônica com a disposição interna dos elementos.
Funcionamento
Ao girar, o gerador de onda aplica ao estriado flexível um perfil elíptico que se movimenta de forma circular. Como resultado, os pontos de engrenamento entre os estriados flexível e circular (extremos do eixo maior R-R da elipse) vão se deslocando de forma rotativa. Ao mesmo tempo, se produz o desengrenamento dos dentes em torno do eixo menor r-r da elipse do gerador de onda.
Sendo que o estriado flexível possui 2 dentes a menos que o estriado circular e, em função do total desengrenamento possibilitado pela forma elíptica do gerador de onda, cada revolução completa deste último provoca o deslocamento de 2 dentes do estriado flexível com relação ao estriado circular supondo este estacionário (fixo). Este deslocamento é no sentido contrário ao de rotação do gerador de onda.
Se o gerador de onda gira no sentido horário o estriado flexível o faz no anti-horário e vice-versa (figuras 2b e 2c). Desta forma a engrenagem harmônica funciona como um redutor de rotação. Como resultado do deslocamento de somente 2 dentes a cada revolução do gerador de onda, o estriado flexível se movimenta com velocidade de rotação consideravelmente menor. Nesta configuração o gerador de onda funciona como elemento de entrada e o estriado flexível como elemento de saída.
A relação de redução depende do número de dentes do estriado circular, supondo que em todas as aplicações o estriado flexível possui 2 dentes a menos.
Assim se o estriado circular possui 102 dentes, o flexível tem 100. Neste caso portanto, serão necessários 50 giros do gerador de onda para que o estriado flexível complete uma rotação completa. Em função de serem opostos os sentidos de rotação, a relação de redução resulta negativa e igual a -50:1.
Para esta configuração de engrenagem harmônica, a relação de redução pode ser calculada dividindo o número de dentes do estriado flexível por 2.
Configurações
Além de funcionar como redutor de rotação, a engrenagem harmônica possibilita outras configurações de funcionamento dependendo de qual componente que atua como elemento fixo, qual o elemento de entrada e qual o de saída. De certa forma as possíveis configurações resultam similares àquelas de um conjunto planetário.
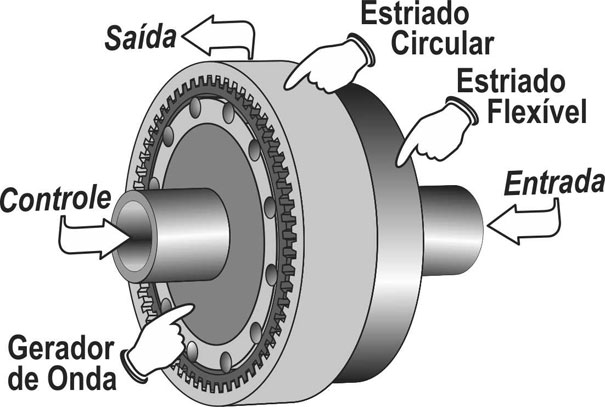
A figura 3 ilustra a configuração utilizada na direção dinâmica que permite obter várias funções diferenciais através da combinação de velocidades e sentidos de rotação dos 3 componentes básicos da engrenagem harmônica. Uma das funções diferenciais é a de superposição (adição ou subtração) de velocidades e ângulos de rotação. Ou seja, permite implementar mecanismos com relação de transmissão variável entre a entrada e a saída.
Neste caso o estriado flexível é o elemento de entrada, o estriado circular é o elemento de saída e o gerador de onda opera como elemento de controle, em todos os casos acionado por um motor elétrico.
Leia também
A relação de transmissão considerada para este exemplo é a que existe entre o estriado flexível e o circular, a qual como será visto a seguir, pode ser variada em função da velocidade e sentido de rotação do gerador de onda.
Em função do estado de funcionamento do motor elétrico que controla a velocidade e sentido de rotação do gerador de onda, podem se apresentar as seguintes situações:
1. Motor elétrico desligado. O gerador de onda GO gira livre. A relação de transmissão é 1:1. O estriado flexível EF (entrada), juntamente com o gerador de onda GO, e o circular EC (saída) giram com a mesma velocidade.
2. Motor elétrico funcionando. Dependendo do sentido de giro e velocidade de rotação do gerador de onda, será a movimentação relativa entre o estriado flexível e o circular.
a) Gerador de onda GO e estriado flexível EF girando em sentidos opostos. Neste caso o estriado circular EC (entrada) e o flexível EF (saída) giram no mesmo sentido. Verifica-se um incremento de velocidade do estriado circular com relação à do estriado flexível. Aplicando a fórmula [1] surge que esse aumento de rotação é proporcional à velocidade de rotação do gerador de onda rotGO.

b) Gerador de onda GO e estriado flexível EF (entrada) girando no mesmo sentido. Neste caso a relação RT é negativa, assim com base na fórmula [1] surgem as seguintes situações:
- Na condição de rotGO/RT menor que rotEF, o estriado circular EC (saída) gira no mesmo sentido que EF (entrada) mas com velocidade menor, a qual diminui com o aumento de rotGO (supondo que rotEF permanece constante) até se anular (EC fica estacionário) quando rotGO = rotEF.
- Na condição de rotGO/RT maior que rotEF, o estriado circular EC gira em sentido oposto ao do estriado flexível EF. A velocidade do estriado circular EC aumenta com o aumento de rotGO supondo que rotEF não varia.
Direção Dinâmica com Engrenagem Harmônica
O elemento principal deste sistema é um atuador eletromecânico que utiliza uma engrenagem harmônica como dispositivo de superposição de ângulos. Como exemplo será utilizado o sistema fabricado pela ZF, o qual pode ser instalado na coluna de direção ou na caixa de direção.
São seus componentes (figura 4):
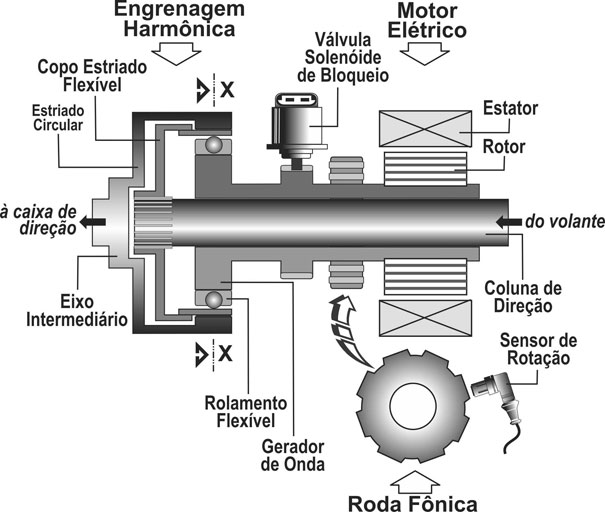
1. Engrenagem harmônica. Funciona como elemento de superposição de ângulos. O estriado flexível é o elemento de entrada (solidário ao volante), o estriado circular é o elemento de saída (ligado ao eixo intermediário ou ao pinhão) e o gerador de onda opera como elemento de controle acionado por um motor elétrico. Nesta aplicação, o estriado circular possui 2 dentes a mais (102) que o flexível (100). o que resulta numa relação de transmissão de 50:1 entre o gerador de onda e o estriado flexível. Ou seja, são necessárias 50 rotações do gerador de onda para adicionar um giro completo do volante.
2. Motor elétrico. É um motor DC sem escovas, solidário ao eixo do gerador de onda. No eixo está instalada a roda fônica de sensoriamento da rotação do gerador de onda.
3. Solenoide de bloqueio. Na condição de desativado, uma mola interna estende o pino que trava a engrenagem instalada no eixo do motor elétrico, impedindo a rotação do gerador de onda. Ao ligar o motor do veículo, o módulo energiza o solenoide de bloqueio, o que provoca a retração do pino, destravando o eixo do motor. Desta forma fica liberada a ação do atuador da direção dinâmica.
4. Módulo de controle. Através da rede CAN se comunica com a UC de estabilidade ESC.
Funcionamento
Ao movimentar o volante, o ângulo de giro aplicado se transmite ao eixo intermediário ou à caixa de direção, com a relação de transmissão determinada pela engrenagem harmônica. Dependendo da velocidade do veículo e de movimentação do volante, o motor elétrico é acionado gerando a superposição de ângulos. Num sentido de rotação do motor elétrico são somados os ângulos de giro do gerador de onda e do estriado flexível solidário ao volante. No outro sentido, há subtração dos ângulos.
Lembrar que no caso do exemplo são necessárias 25 rotações do gerador de onda para adicionar ou subtrair meio giro do volante.
Por exemplo, para o sentido de giro do volante aplicado ao estriado flexível (1) como indicado na figura 5:
- Com o gerador de onda girando no sentido (2) há soma de ângulos (superposição positiva) ou seja, aumento do ângulo de esterçamento. Este é o comportamento do sistema em velocidades médias e baixa.
- Com o gerador de onda girando no sentido (3) há subtração de ângulos (superposição negativa) ou seja, diminuição do ângulo de esterçamento. Este é o comportamento do sistema em velocidades altas. Nesta situação um determinado ângulo de giro aplicado ao volante gera um ângulo de esterçamento das rodas menor que o mesmo ângulo aplicado ao volante em baixa velocidade.
- Como complemento ao sistema de estabilidade dinâmica, o sistema atua também de forma autônoma (sem intervenção do condutor) no caso de tendência rotacional em torno do eixo vertical do veículo (sobre-esterçamento) como, por exemplo, nos casos de frenagem em piso com diferentes graus de atrito ou curvas acentuadas em alta velocidade. Nestas situações a direção ativa corrige em até +/- 4 ou 5 graus, o ângulo de esterçamento no sentido de compensar o momento de rotação gerado.
Conteúdo
útil?
Faça login para avaliar
Foi útil?


