Rede CAN - Sistema de transmissão de dados em rede entre os módulos de controles veiculares
O conhecimento facilita e acelera o trabalho, isso se aplica na reparação dos veículos e também no próprio carro que saiu de um sistema mecânico, avançou para controles elétricos e eletrônicos compartilhados
Por: André Miura - 13 de julho de 2017

Considera-se convencional um sistema de comunicação eletrônico de um veículo que possui suas unidades de controle (módulo de injeção, módulo de conforto, ABS e entre outros) trabalhando de maneira isolada.
Uma desvantagem desse sistema é quando uma mesma informação é importante para uma ou mais unidades de controle, se faz necessário o uso de componentes, como por exemplo, chicotes elétricos e conectores em maior quantidade.
A presença desses componentes em excesso aumenta a complexidade do chicote elétrico, gerando maior possibilidade de falhas e dificuldades no diagnóstico.
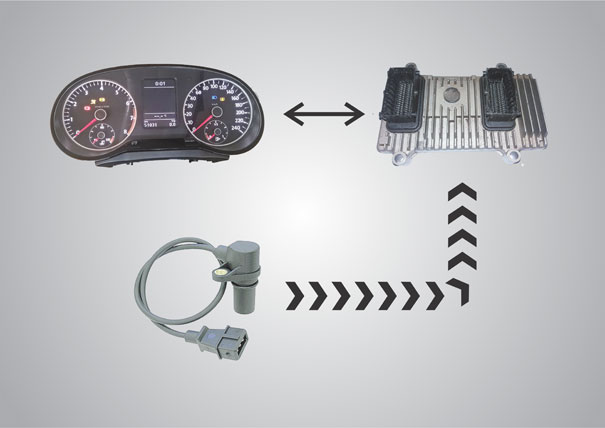
A imagem abaixo mostra duas unidades de controle que necessitam das mesmas informações, como o sinal de rotação. Em um sistema convencional é necessário que cada unidade tenha suas conexões e sensores no motor para captar essas informações, dessa forma há conexões e chicotes em excesso.
REDE DE COMUNICAÇÃO ENTRE AS UNIDADES DE CONTROLE ELETRÔNICO
O uso de uma rede de comunicação elimina componentes em excesso, pois as informações necessárias para mais de uma unidade de controle são transmitidas pela rede simplificando o sistema eletroeletrônico do veículo. Essa rede de trabalho é conhecida como REDE CAN (Contoller Area Network).
FUNCIONAMENTO DA REDE CAN
É uma rede de comunicação entre as diversas unidades de controle, que operam com protocolo de comunicação serial bidirecional CAN BOSCH.
O protocolo CAN multimaster/multicaster opera com todas as unidades de controle tendo o mesmo direito de acesso ao barramento. Este protocolo tem como vantagem continuar funcionando caso uma das unidades apresente problemas.
Ao iniciar o processo de transmissão de informação, a unidade de controle envia um pacote de dados na rede. Cada pacote é composto por um código identificador e logo em seguida as informações.
O código identificador nomeia qual será o pacote a ser transmitido. Vale lembrar que em um mesmo veículo não existem pacotes de dados com o mesmo código identificador. É ele que define a prioridade entre os pacotes e terá prioridade de transmissão o pacote que possui o número identificador menor, que será reconhecido como mais importante ou seja, se dois módulos estiverem transmitindo informações ao mesmo tempo, a prioridade será dada ao número identificador menor, tendo em vista que duas informações não podem passar ao mesmo tempo pelo barramento.
Após o envio do identificador, a unidade de controle envia um conjunto de dados (bits), dados esses que são informações úteis como por exemplo rotação do motor, temperatura, pressão do óleo etc.
Durante a transmissão de dados por uma das unidades de controle, todas as outras apenas leem as informações do barramento, caso sejam informações importantes serão memorizadas, caso contrário apenas lidas.
As velocidades para compartilhamento de dados podem variar conforme a importância da informação.
• CHASSI CAN (C-CAN): Tem funções de transmitir dados em altas velocidades entre unidades que precisam trabalhar com informações mais importantes como ABS, injeção eletrônica e podendo chegar a 1000 Kbits/s.
Informações importantes a saber sobre a C-CAN é que possuem dois cabos que são nomeados de CAN HIGH e CAN LOW que trabalham com tensões de 2,5V a 5V e 0V a 2,5V respectivamente.
BODY CAN (B-CAN): ao contrário da C-CAN, tem funções de transmitir dados em baixas velocidades entre unidades que controlam funções de carroceria como travas elétricas, vidros elétricos, iluminação, etc., sua velocidade de trabalho pode chegar a 125 Kbits/s.
A rede B-CAN também possui dois cabos, chamados CAN A e CAN B, que trabalham de forma inversamente proporcional ou seja, enquanto CAN A está com 5V o CAN B está com 0V. Através dessa variação, pode-se melhorar a proteção contra interferências.
EXEMPLO DE FUNCIONAMENTO REDE B-CAN
A unidade de controle do motor está transmitindo um pacote de dados com o número identificador 4, que contém as informações:
- Rotação do motor;
- Temperatura do motor;
- Pressão de óleo.
A unidade transmite um bit por vez, numa velocidade de 50 Kbits/s. A tensão no barramento varia de acordo com o bit que está sendo transmitido (1 ou 0).
É possível capturar a comunicação CAN entre as unidades de controle em bancada utilizando um simulador de Centrais. Com ele é possível ligar em bancada as unidades de controle que têm acesso à rede CAN do veículo e medir os sinais de transmissão de dados. Para isso podemos efetuar com o simulador a variação de diversos sensores e observar a transmissão desses dados com um osciloscópio.
Um veículo pode trabalhar apenas com rede C-CAN, apenas com rede B-CAN ou então, poderá trabalhar com as duas redes. Quando um veículo trabalha com as duas redes é necessário que uma das unidades faça a transferência de dados da rede alta para a rede baixa ou vice-versa.
.jpg)
.jpg)
TESTE PRÁTICO IMPORTANTE
Um teste prático que deve ser um dos primeiros a ser feito, em caso de possibilidade de falha na comunicação da Rede, é o teste de resistência da rede.
- Com o esquema elétrico em mãos, identifique os terminais de comunicação CAN,
- Desligue o polo negativo da bateria para que não haja tensão ou sinal nas linhas. Para se medir resistência elétrica não deve haver sinal e em vários casos, mesmo com a ignição desligada ainda há presença de tensão na linha,
- Com o auxílio de um multímetro, medir a resistência nas linhas CAN Low e CAN High,
- Verifique a ligação das resistências, como exemplo, com a ligação de dois resistores de 120 Ohms em paralelo, um em cada unidade de controle conectadas na rede, temos a medida de resistência caída pela metade. Verificaremos no multímetro a medida de 60 Ohms.
