Diagnóstico de falhas no sistema de comunicação entre módulos através do conector DLC
Códigos de falhas padrão OBDII iniciados com a letra U são específicos da comunicação de módulos da rede CAN, que exige uma combinação de mais conhecimento do reparador e uso de equipamentos específicos
Por: Laerte Rabelo - 28 de agosto de 2017
Nos veículos atuais, há uma grande necessidade de compartilhamento de informações entre os diferentes módulos eletrônicos, a fim de promover o perfeito funcionamento de seus diferentes sistemas. Entretanto, isso só foi possível pela parceria entre a Bosch e a Intel que, em 1987 desenvolveu o protocolo CAN-bus para a indústria automotiva.
Rede CAN – Controller Area Network ou Rede de Controladores de Área, também conhecida como sistema multiplexado, que se distingue da antiga tecnologia elétrica por fazer circular muitas informações entre diversos sistemas através de um único canal de transmissão de dados, materializado por dois cabos.
A palavra BUS está relacionada à capacidade de transportar uma grande quantidade de informação. CAN-bus é uma rede composta por diversos módulos de controle eletrônico que se comunicam entre si utilizando dados seriais.
.jpg)
A figura 1 mostra o uso da Rede CAN e neste caso, apenas um módulo recebe as informações dos sensores de rotação e temperatura (destacadas na cor cinza) e envia para o outro módulo através da rede.
Funcionamento do sistema
Por mais que não seja o objetivo deste artigo explicar com detalhes o funcionamento da Rede CAN, vamos tecer breves comentários necessários para a realização do diagnóstico, caso o caro leitor deseje se aprofundar no tema, basta consultar a edição de junho deste jornal na coluna Técnicas, na qual foram explicadas de forma bastante didática as particularidade e características deste sistema.
O protocolo CAN opera com o princípio multimestre, ou seja, todos os módulos eletrônicos têm o mesmo direito de acesso ao barramento, não existindo um único servidor ou mestre. Uma das vantagens desse tipo de rede está no fato de que, se um dos módulos apresentar algum problema, os outros continuam funcionando normalmente.
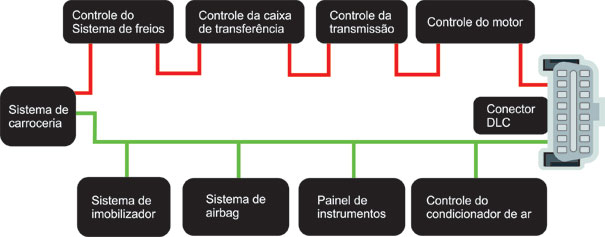
Enquanto uma unidade eletrônica transmite uma informação, todas as outras simplesmente leem essa informação no barramento. Assim, quando uma “fala”, as outras “ouvem”. Se a informação não for importante para um módulo, ele ouve, mas não memoriza; se a informação for importante para um módulo, ele ouve e memoriza os dados. A figura abaixo mostra um exemplo de arquitetura da Rede CAN, os módulos que o compõem e o conector de link de dados (DLC).
Redes de comunicação de dados fornecem uma forma segura e com boa relação custo/benefício para vários componentes do veículo “conversarem” uns com os outros e compartilhar informações.
As figuras 3 e 4 mostram, respectivamente, a configuração de um sistema eletroeletrônico convencional e um sistema eletroeletrônico que utiliza a rede de comunicação de dados.


Observem que com a adoção das redes de comunicação de dados no sistema eletroeletrônico veicular tem-se as seguintes vantagens:
• Redução da quantidade de cabos;
• Redução do peso;
• Redução do custo, eliminando cabos, sensores e conectores;
• Aumento da confiabilidade do produto;
• Facilita o diagnóstico e a reparação;
• Possibilitou o aumento do número de módulos.
Na prática, as montadoras de veículos utilizam basicamente dois tipos de barramentos: o de alta velocidade e o de baixa velocidade, que se comparados entre si, são de natureza diferente pela velocidade de transmissão de dados, características do sinal e comportamento, garantindo uma rápida e eficiente troca de informações entre os dispositivos.
Rede CAN de baixa velocidade
O Barramento de Baixa Velocidade é utilizado em aplicações em que não é necessária uma alta taxa de dados, o que permite a utilização de componentes de menor complexidade. Normalmente é usado para funções controladas pelo operador nas quais as necessidades de tempo de resposta são mais lentas do que aquelas necessárias para o controle dinâmico do veículo.
A Rede Serial de Dados de baixa velocidade consiste de um barramento auxiliado por um único fio, com acionamento auxiliar de alta tensão. Durante o funcionamento do veículo, símbolos de dados (1s e 0s) são sequencialmente transmitidos em nível normal de 33,3 Kbit/s. Para a programação de componentes, um modo especial de alta velocidade de dados de 83,3 Kbit/s pode ser usado.
A figura 5 mostra o sinal da rede CAN de baixa velocidade utilizando-se de um osciloscópio, o sinal foi captado através do pino 1 do conector de link de dados (DLC).
Rede CAN de Alta velocidade
A Rede CAN de Alta Velocidade é utilizada quando os dados precisam ser trocados a uma velocidade suficientemente alta para minimizar o atraso entre a ocorrência de uma mudança de valor do sensor e a recepção desta informação através de um dispositivo de controle. É composta de um par de cabos entrelaçados, identificados como CAN-Alto e CAN-Baixo, e nas extremidades, entre o CAN-Alto e CAN-Baixo, existem resistores de terminação de 120 Ω, ou dois associados em série, de 60 Ω.
Os dados são transmitidos sequencialmente a uma velocidade de 500 Kilobits por segundo. Os estados lógicos são representados pela diferença de tensão entre a CAN-Alto CAN-Baixo.
O estado lógico ‘1’ ocorre quando o CAN-Alto e CAN-Baixo não são acionados; os dois circuitos de sinal estão na mesma tensão; a diferença de tensão deve ser de aproximadamente 0 Volt;
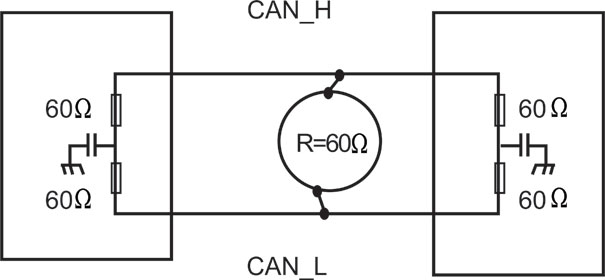
O estado lógico ‘0’ ocorre quando o CAN-Alto e CAN-Baixo são acionados; nesse caso a soma de suas tensões deve ser de aproximadamente 5 Volts. Na próxima figura vemos os resistores de terminação e valor de resistência entre a CAN- Alto e CAN- Baixo.
A Rede CAN de Alta velocidade utiliza cabos entrelaçados como os mostrados na figura abaixo para evitar interferências eletromagnéticas, que poderiam influenciar na transmissão de dados, ocasionando várias anomalias no sistema.
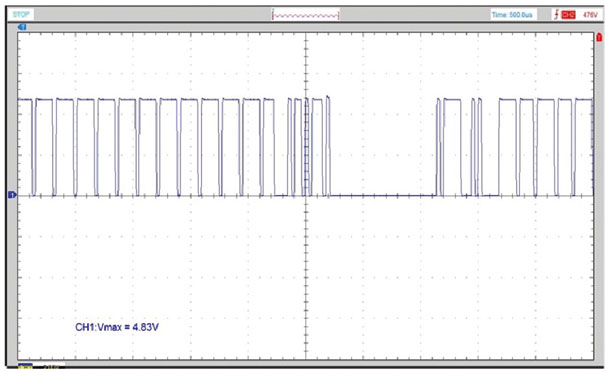
A próxima figura mostra o sinal da Rede CAN de alta velocidade captado por um osciloscópio através dos pinos 6 e 14 do conector de link de dados (DLC).
A característica fundamental dos sinais oriundos dos cabos entrelaçados CAN-Alto e CAN-baixo representados respectivamente pelos canais 1 (azul) e 2 (vermelho) é o espelhamento entre eles. Caso esse espelhamento não seja observado durante toda a trama, é um forte indício de falha na comunicação entre os módulos e, consequentemente, será gerado um código de falha específico, que irá orientar o reparador no procedimento de diagnóstico.


Conector de Link de Dados (DLC)
O Conector de link de dados (DLC) é um conector de 16 cavidades padronizado. O desenho do conector e o local são ditados por um padrão do setor e é necessário fornecer o seguinte:
• Terminal 1- Terminal de comunicações Rede CAN de baixa velocidade;
• Terminal 2 -Terminal de comunicações Classe 2;
• Terminal 4 -Terminal de aterramento da ferramenta de diagnóstico;
• Terminal 5 -Terminal de aterramento do sinal comum;
• Terminal 6- Terminal (+) do barramento de dados seriais da Rede CAN de alta velocidade;
• Terminal 14- Terminal (-) do barramento de dados seriais da Rede CAN de alta velocidade;
• Terminal 16- Energia da ferramenta de diagnóstico, terminal de voltagem positiva da bateria.
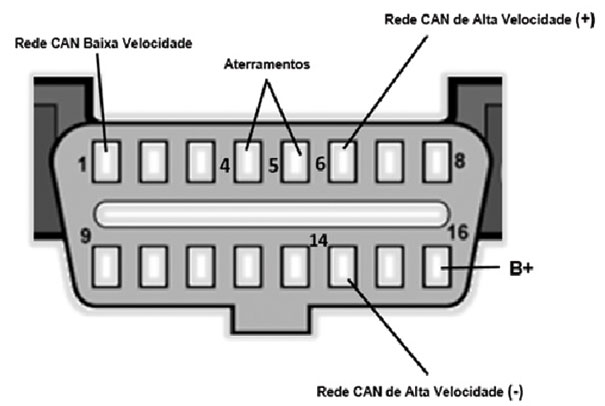
A figura 9 mostra o posicionamento dos pinos no conector DLC.
Códigos de Falhas do Tipo Uxxxx
Esses códigos têm como objetivo facilitar o diagnóstico e reparo das redes de comunicação presentes nos veículos. Eles auxiliam na identificação de um ponto inicial para o diagnóstico das redes CAN (alta e baixa velocidades), através deles o reparador poderá analisar o funcionamento dos conectores e chicotes elétricos que fazem parte do sistema.
Veja na figura 10 alguns exemplos de códigos tipo Uxxxx com seu significado:
Diagnóstico do Sistema
Após a descrição das Redes de Comunicações entre os módulos, do conector de link de dados (DLC) e finalmente, dos códigos de falhas do tipo Uxxxx, chegou o momento de aplicarmos os procedimentos de diagnóstico, visando a auxiliar o reparador quando se deparar com uma falha nesse tipo de sistema.
Diagnóstico com multímetro Rede CAN baixa velocidade através do conector DLC
Método 1. Utilizando-se de um osciloscópio na escala de tensão contínua (VDC), realizar a medição no pino 1 no conector de link de dados (DLC). Após ligar a ignição ou funcionar o veículo, o valor da tensão do sinal é acionado e ficará em torno de 4,0V, podendo ultrapassar um pouco esse valor, como demonstrado na figura 11.
.jpg)
Método 2. Utilizando-se de um multímetro na escala de tensão contínua (VDC), ligar a ignição ou funcionar o veículo e realizar a medição entre os pinos 1 e 5 no conector de link de dados (DLC), o valor encontrado deve estar entre 1,8 a 2,5V.
.jpg "Figura 12. Ligação dos cabos do multímetro no conector DLC")
.jpg "Figura 13. Valor da tensão entre os pinos 1 e 5 do conector DLC")
As figuras 12 e 13 mostram, respectivamente, a ligação dos cabos do multímetro no conector DLC e o valor de tensão exibido em seu display.
Diagnóstico com multímetro Rede CAN Alta Velocidade através do conector DLC
Para a realização do diagnóstico da Rede CAN de Alta Velocidade, utilizando-se de um multímetro, são realizadas duas medições no conector DLC que serão descritas a seguir:
Primeira medição - Configurando o multímetro para a medição de resistência elétrica e em seguida, inserindo suas pontas de provas nos pinos 6 e 14 do conector DLC, o valor encontrado deve estar em torno de 60 ohms, entretanto, caso exista alguma anomalia no sistema este valor ficará em torno de 120 ohms, identificando circuito aberto em algum ponto da rede.
Atenção: essa medição deve ser realizada com a bateria do veículo desligada, pois caso contrário o multímetro será danificado e/ou será exibido um valor diferente do especificado, provocando assim um erro no diagnóstico.
Conforme mostram as figuras 14, 15 e 16 a seguir:
.jpg "Figura 14. Ligação dos cabos do multímetro no conector DLC")
.jpg "Figura 15. Rede CAN Alta velocidade funcionamento sem anomalia")

Segunda medição - Com a ignição desligada, realize a medição da tensão no pino 6 e 14 do conector DLC, observar se os valores encontrados são praticamente iguais; a diferença de tensão entre eles deve ser de aproximadamente 0 Volts. Agora com a ignição ligada, verifique se a soma das tensões encontradas nos pinos 6 e 14 tem um valor de aproximadamente 5 Volts.
Caso não seja encontrado esse valor, é um indício que há falha na Rede CAN de alta velocidade.
As próximas figuras mostram detalhadamente, tanto a ligação das pontas de provas do multímetro no conector DLC, quanto o valor de tensão exibidos em seu display.
Com a ignição desligada - Observando os valores de tensão provenientes dos pinos 6 e 14, têm o mesmo valor de tensão, ou seja, 2,1Volts, e a diferença entre eles é de 0 Volts; demonstrando que o sistema está com perfeito funcionamento (fotos 17 a 20).




Com a ignição ligada - Analisando os valores encontrados, vemos que seu somatório foi de aproximadamente 5 volts; constatando que o sistema está em perfeito funcionamento (fotos 21 a 24).




Por todas estas ideias apresentadas, observamos que o advento das redes veiculares foi um verdadeiro divisor de águas na indústria automotiva, pois proporcionou o desenvolvimento tecnológico dos veículos atuais. Vimos também seu funcionamento, tipos arquitetura básica, assim como, os códigos de falhas específicos deste sistema. E principalmente, apresentamos os procedimentos de diagnóstico, procurando facilitar ao máximo a vida do reparador quando se deparar com falhas neste sistema em seu dia a dia na oficina.
Até a próxima.